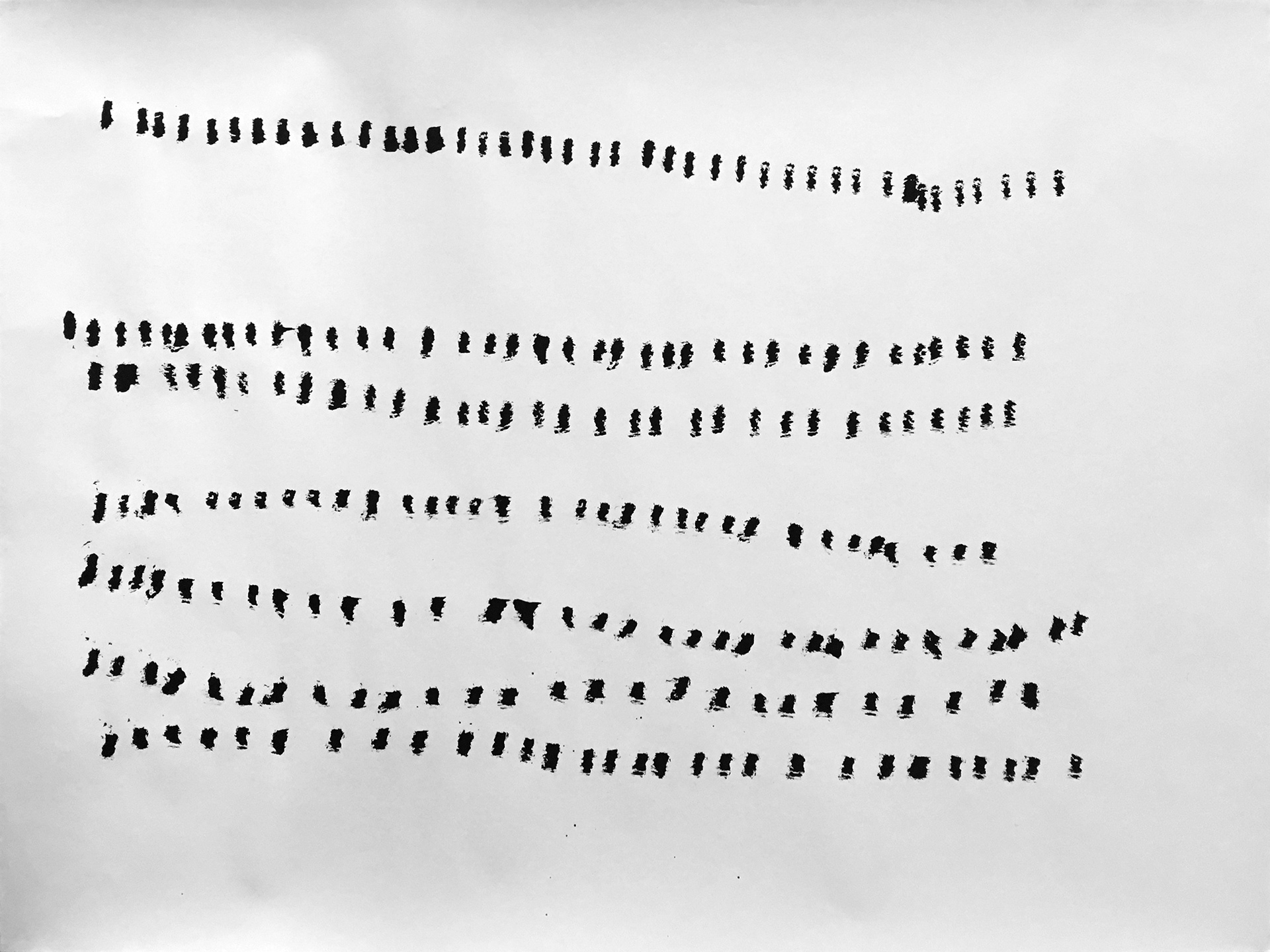
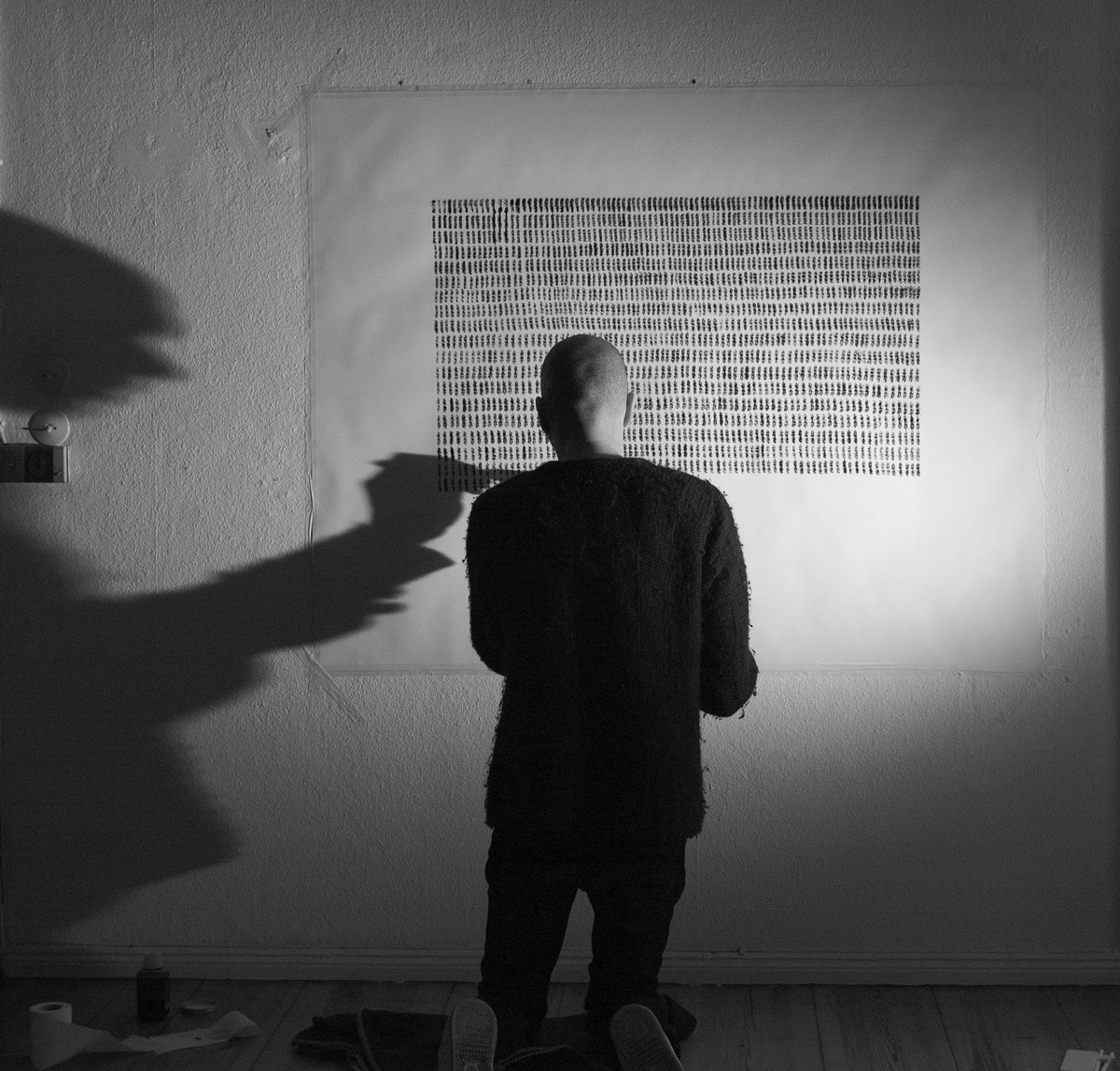
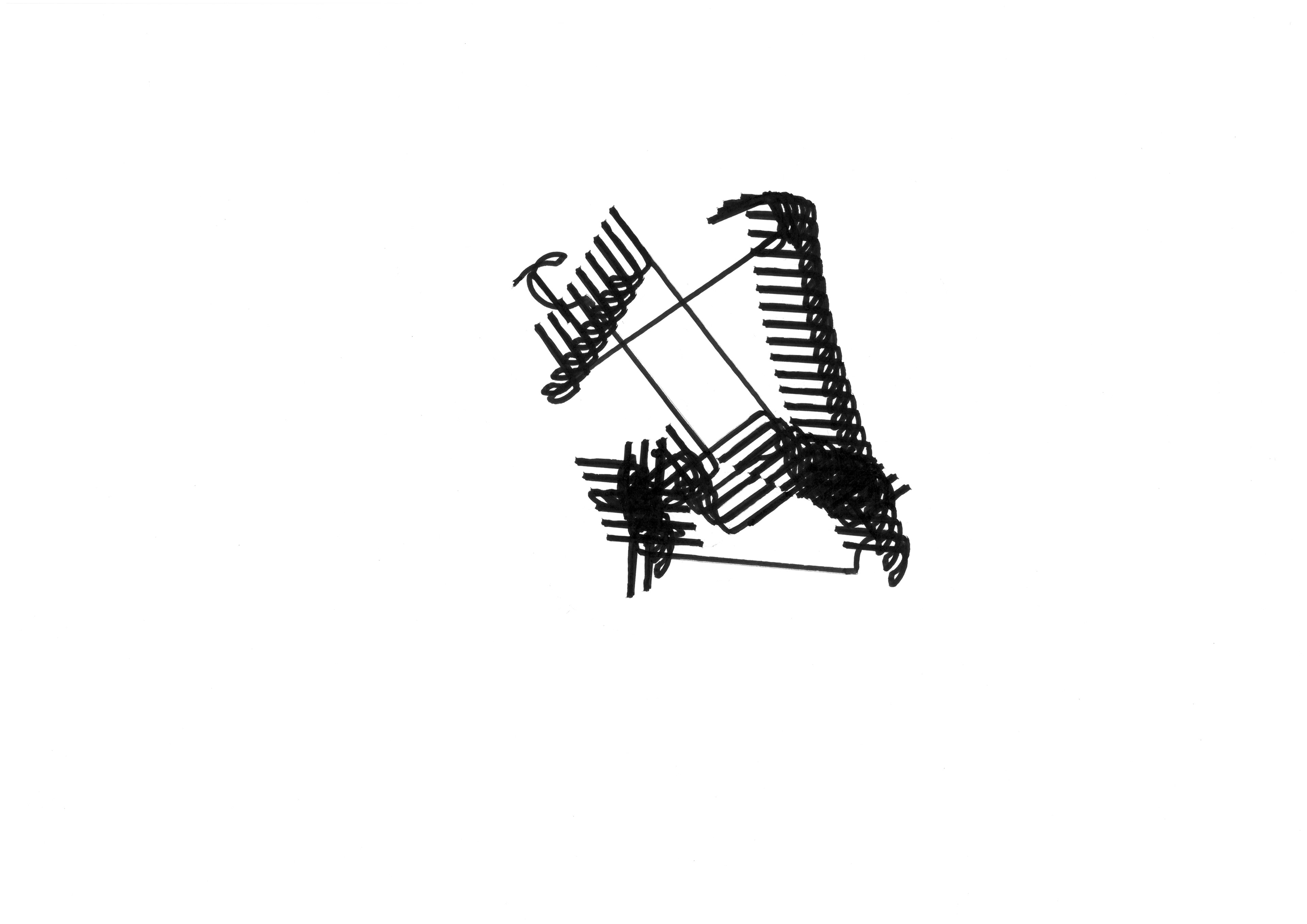
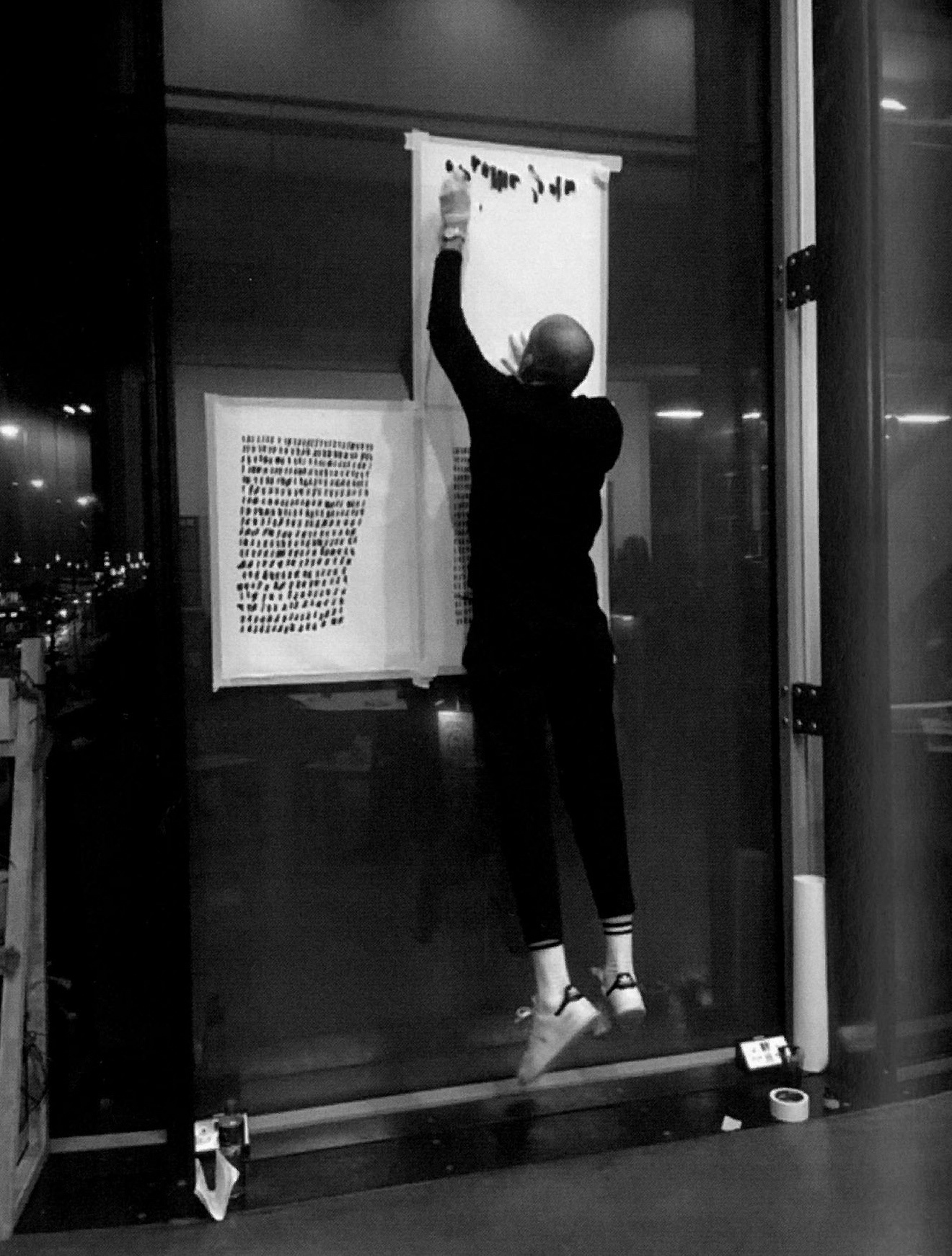
If all other projects have specific places in the research, Penal Strokes articulates its places as the entire thesis’s process and methodology. Inspired by Sol Lewitt’s rule-based paintings, the artist decided to devise a performative gesture, repeated ad nauseam, as long as the body could stand to perform it, indulging in some form of absurd justification of the self-punishment, reverberating with Kafka’s short story In the Penal Colony. Just like algorithmic explorations, the new method is first explored in the known environment to assess it and compare it to the known behaviour of other models in the same environment. *Penal Strokes* started in the artist’s studio in late night hours.
After the first enthusiasm for the repetitive performative gesture disappeared, the artist, as a coder, decided to use the algorithm in its first definition as a shortcut and program a robot to mime the performative gesture, outsourcing the punishment to the machine. Developed and tested in the clean environment of the computer screen, the algorithm performed as expected, waiting to be transferred to the robot’s firmware. After the transfer, the robot was equipped to move. However, its behaviour did not in any way resemble the peaceful and deliberate strokes of the artist.
Situated in the real environment and embodied in a wooden body with wheels and servomotors, the algorithm was deterministically (blindly) executing the exact instructions with drastically different results in each iteration. Its frantic moves and speed resembled someone wanting to finish their task as soon as possible regardless of the results rather than patiently bearing their atonement.
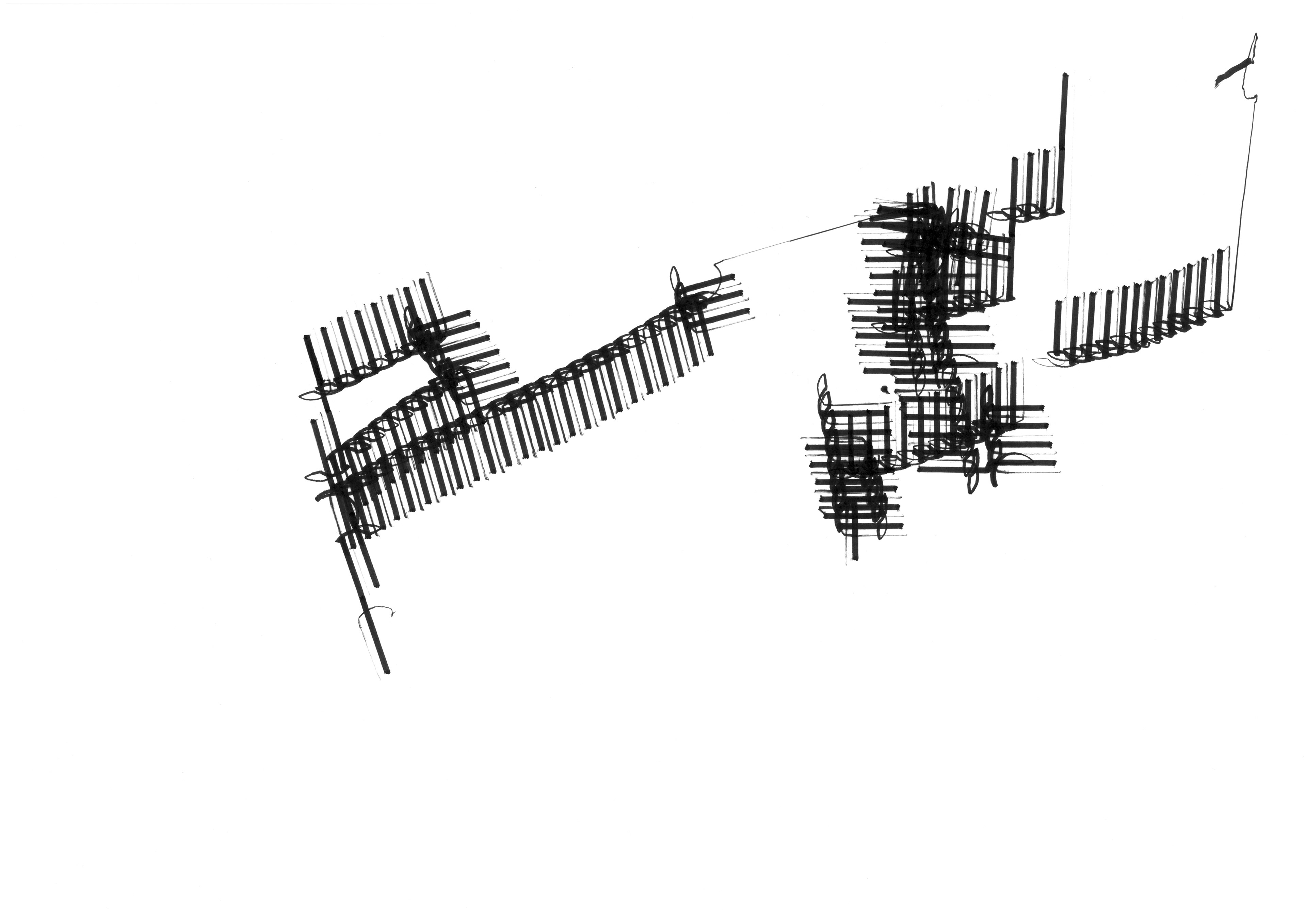


While the algorithm did not “learn” anything, its algorithmic articulation revealed three things. First, it showed the importance of situatedness and embodiment of algorithmic agents in physical environments. Second, it taught the artist the importance of exploring various environments and their intrinsic restrictions. This realisation triggered the inclusion of adverse environmental conditions during the execution, another process in the performative gesture execution, yielding radically different results and revealing the change of the environment in the drawing.
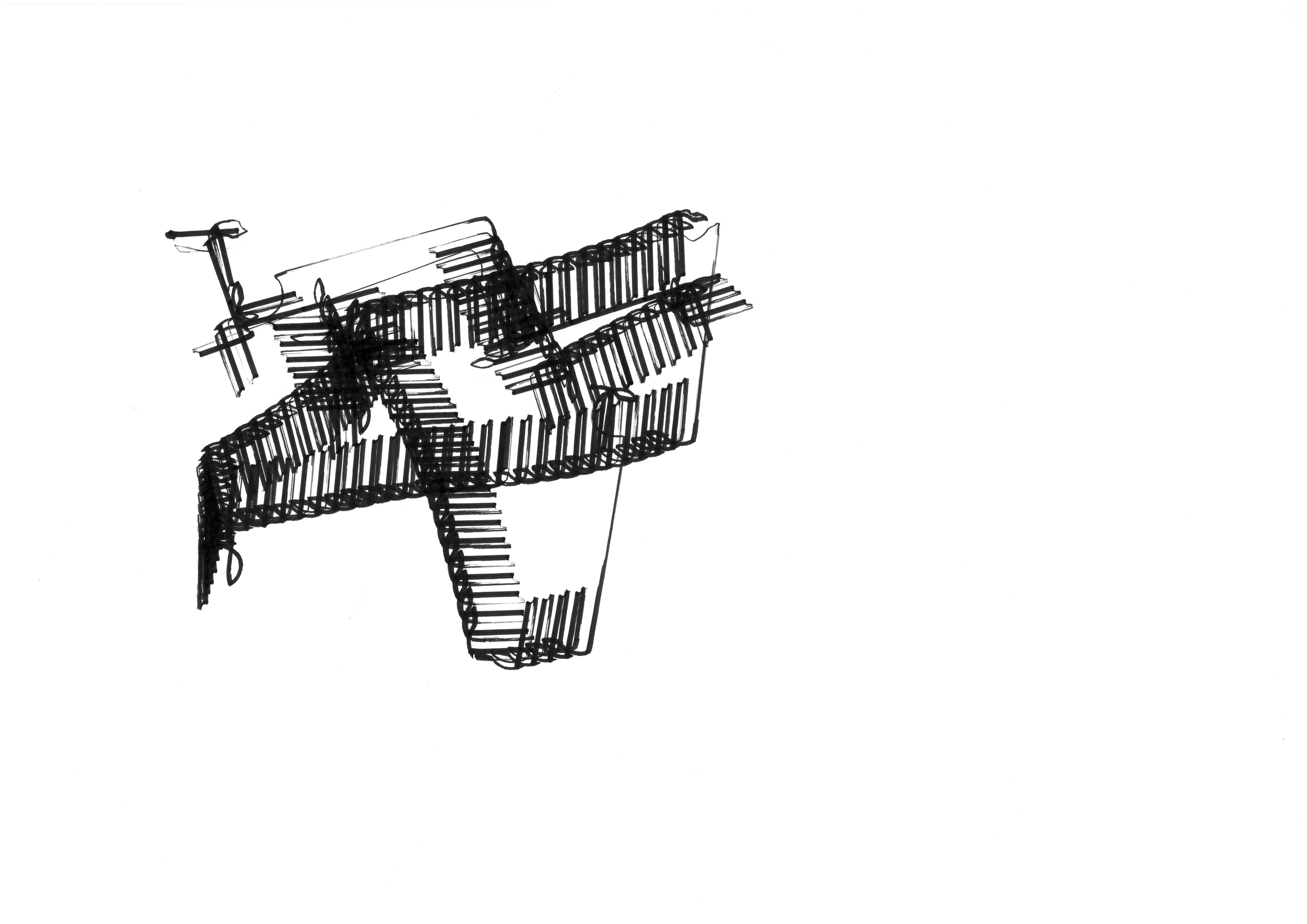
Third, it showed the importance of understanding the inner workings of algorithms. While an observer of the robot’s “behaviour” might have assumed that it was programmed to “behave” frantically, the articulation was devoid of any intention, creativity or will. The drawings were a product of material conditions and forces in the encounter with translating algorithmic code into mechanical movements. The performances of the robot and the artists continued taking place at the same time during various exhibitions. At the opening of FLIGHT MODE, the annual PhD research exhibition of the Royal College of Art, the robot was performing its "dance":

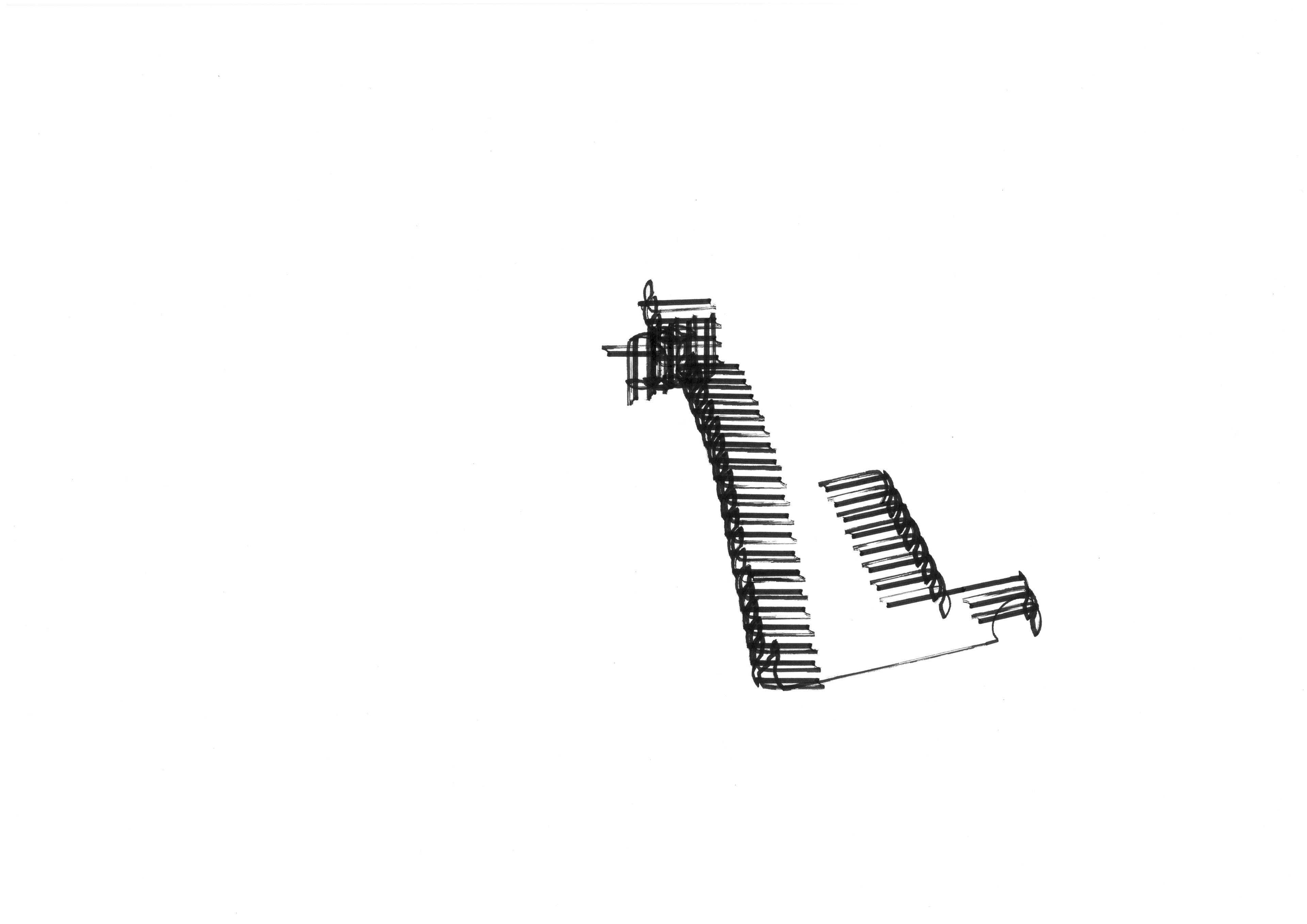
And during the performance programm the artist was exploring another "adverse" environment with his eyes bound, through the consequent performance of the gesture. While performing, one of the kids, while watching the performance, recognised the "adversity" of the situation and asked his dad: "He can't see anything. Shouldn't we help him with the drawing?":


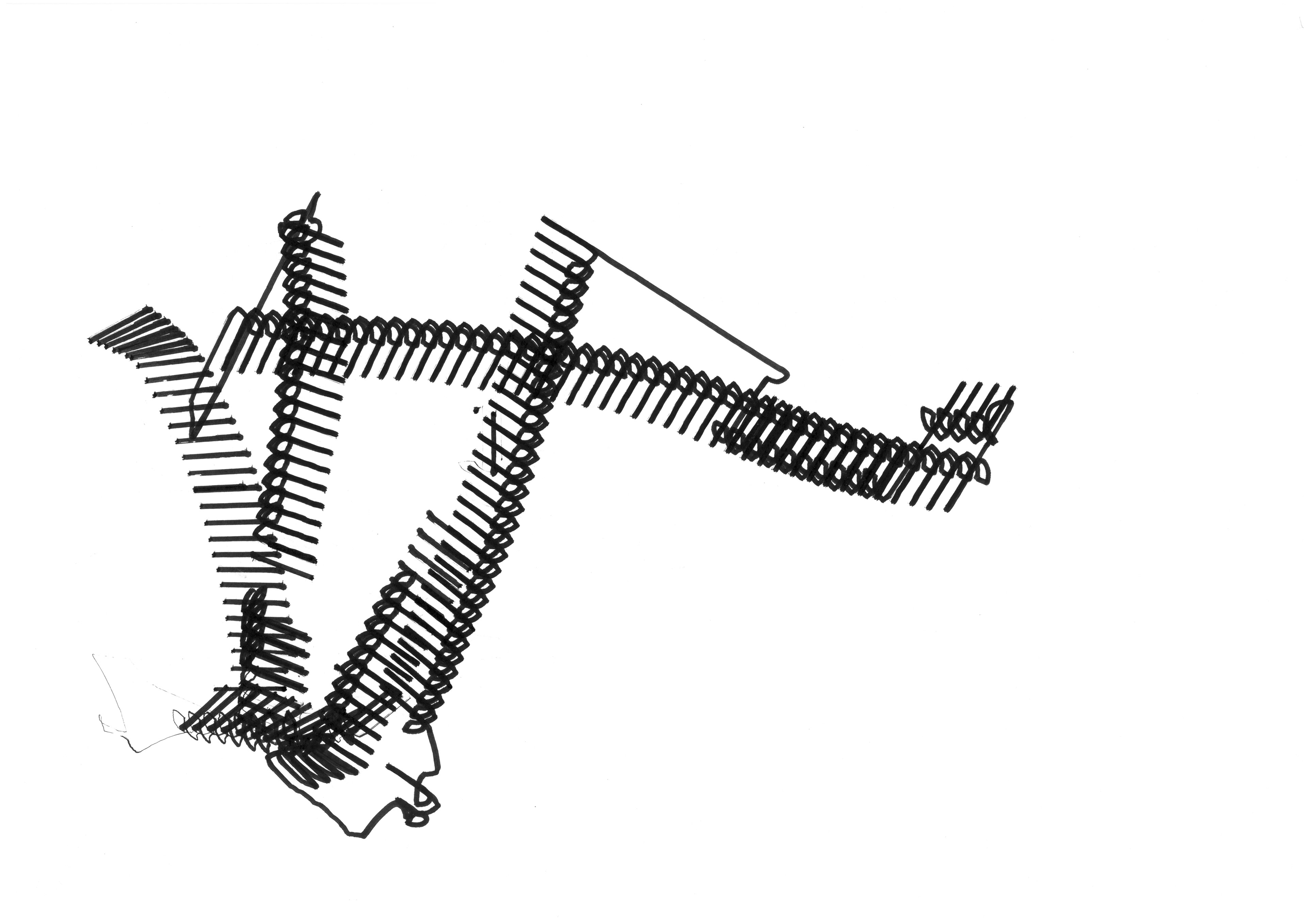
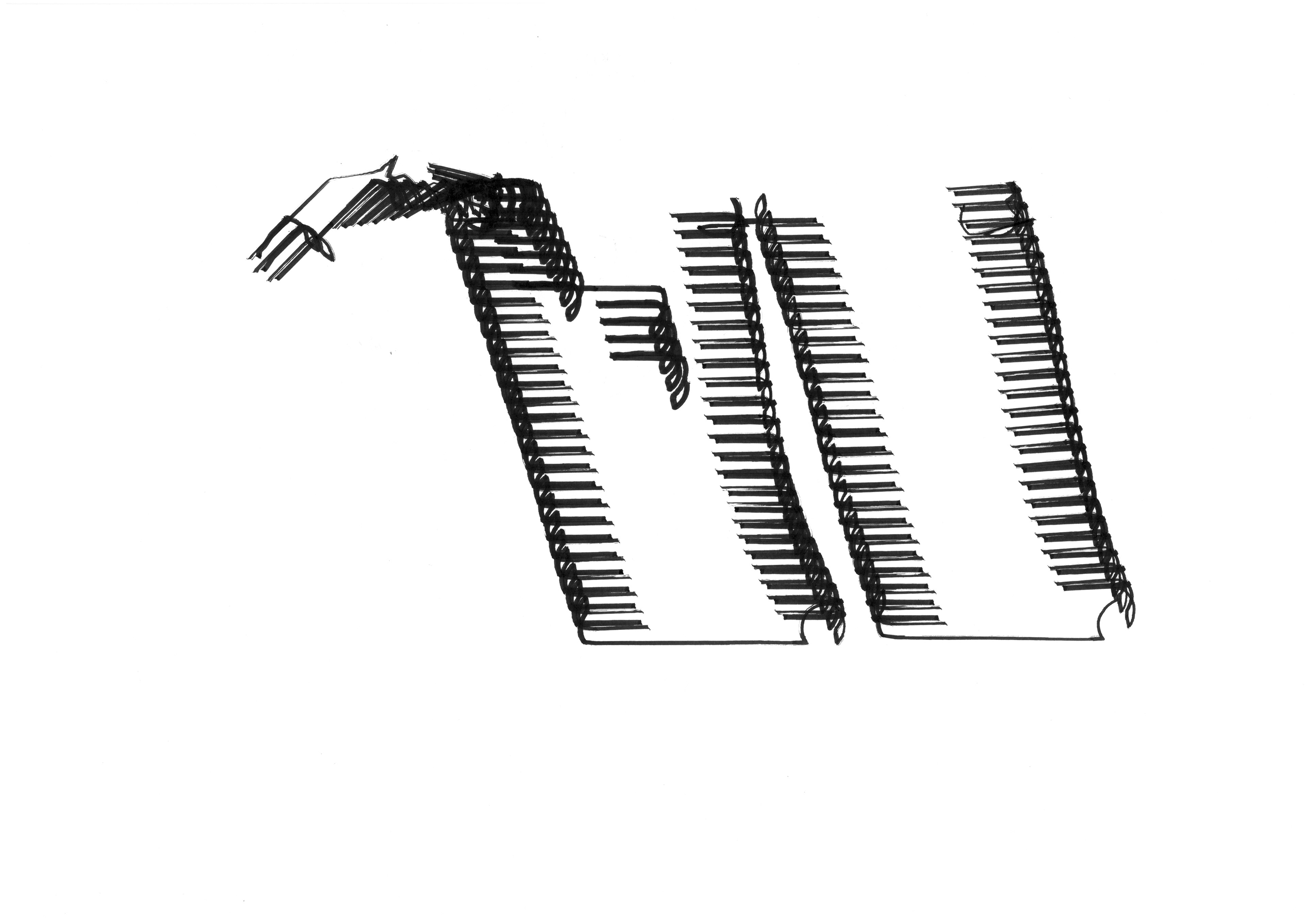
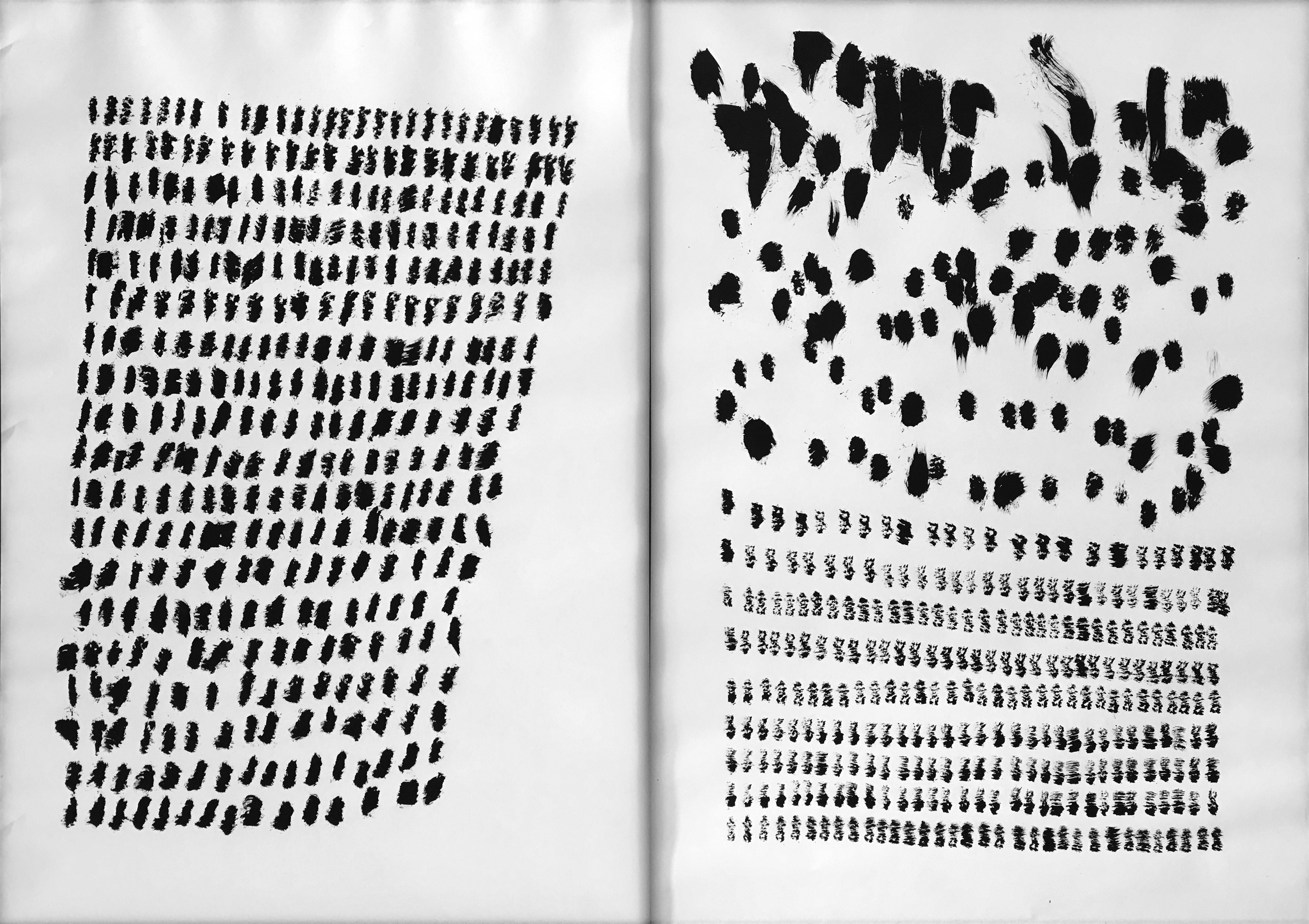
The previous performance articulated a drastic change of the environment (the artist need not to jump anymore to perform the gesture) through the sudden regularity in the strokes. This performance foreground the importance of an agent's adaptibility to the unknown or adverse environment, and the exploitation of its aspects. The second line in the drawing exhibits a stronger horizontality than any other line. To draw this line, the artist used the frame of the drawing as a guide, immediatly adapting to the feature of the given environment: